

An amphibious robot named AQUA splashes onto the research scene
Imagine floating over a coral reef, enjoying the sight of colourful tropical fish swimming below you, feeling the warmth of the sun on your back in the crystal waters of the Caribbean Sea. Suddenly, from the corner of your eye, you see a yellow flash. Turning your head, you take an involuntary, snorkelled gasp. You are confronted by two beady black eyes bearing down on you. A big fish? A shark? A sea monster?
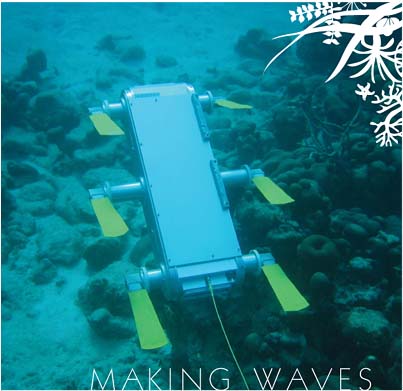
Hang on...those eyes look like cameras - and between them is a common everyday light bulb! You strain to focus through the water. The object turns broadside. Six flippers, three on each side, flutter up and down in the water, propelling what you now see is an object about the size of a large briefcase over the coral. You have just met AQUA, the amazing underwater robot.
"There's no other legged robot that swims through the water," says Gregory Dudek, Director of the McGill Research Centre for Intelligent Machines, and one of the robot's creators. "AQUA uses flippers - and it swims kind of like a shrimp or a turtle. That's truly unique."
ROBOT ROOTS
AQUA, the product of a three-year research collaboration between McGill, York and Dalhousie universities, is the brainchild of Dudek and Michael Jenkin from York, who decided several years ago to design a robot that could walk, swim and see. With sponsorship from the Institute for Robotics and Intelligent Systems (IRIS) - one of the federally funded Networks of Centres of Excellence that bring together top researchers in the country - Dudek, Jenkin, Evangelos Milios from Dalhousie and their teams of computer scientists and engineers designed and built AQUA and immediately made a splash in high-tech news after its initial ocean trials in January 2004.

McGill professor Gregory Dudek.
AQUA is the University's latest "robotic hexapod," a group of robots developed in part at McGill. As small terrestrial robots, the earlier versions were designed by members of the Department of Mechanical Engineering to move somewhat like a cockroach. AQUA's physical design is similar, but this robot is amphibious - it can swim underwater and splash through surf, as well as walk on land - a very unusual characteristic in the robot world. Built by researchers from the Centre for Intelligent Machines affiliated with McGill's School of Computer Science, this system puts a higher premium on sensing and thinking about its environment.

York University professor Michael Jenkin.
As far as robots or remotely controlled vehicles (ROVs) go, AQUA is small - only 65 centimetres long, 50 centimetres wide and 13 centimetres high (25" x 20" x 6"). While many ROVs are so heavy they must be deployed by crane, AQUA, weighing only 18 kilograms, can be thrown into the water by an energetic graduate student. Its body is an aluminum waterproof shell containing two computer processors - one controlling movement, the other controlling vision. Three flippers are attached to each side of the shell, and two cameras are mounted in the front, as well as one at the back. A thin yellow fibre optic cable tethered to the rear allows information, such as video or operating instructions, to be transferred between the robot and a land-based computer.
Building a robot for the underwater world is no easy task, according to Chris Prahacs, BEng'02, AQUA's designer. He explained the hardware challenges, such as ensuring that water doesn't damage the robot's electronics. The robot's body must be properly sealed to withstand pressure while operating at various depths.
Working underwater with the robot also presents logistical challenges to accompanying divers, including risks from adverse weather and sea conditions. "In general, things are infinitely more difficult underwater," Dudek laments. "There's a huge overhead in doing even the simplest experiment."
With these additional obstacles, underwater experimentation is far more expensive than research on land. But Dudek adds optimistically, "The upshot is that there has been relatively little work done underwater, so if we can bear to suffer through those challenges, there are a huge number of opportunities for us."
The collaborative research group - made up of eight graduate students, three faculty members, several undergraduates and one full-time staff member - has been investigating cutting-edge robotics questions with AQUA, including how robots move and "see" in marine environments. Other marine ROVs use propellers for locomotion, but AQUA's flippers allow it to swim, enhancing its agility and increasing its range of motion. Dudek explains, "A lot of creatures swim, so this should be a useful way of achieving locomotion underwater. How we can exploit such mechanisms is an interesting problem."
Dudek and his team achieve AQUA's locomotion by sending a series of commands and receiving video via the robot's fibre optic tether. Onshore, the operator watches what the robot sees on a computer screen and directs the robot accordingly, using a joystick in a manner similar to playing a video game. By changing the speed, direction and synchronization of the flipper propulsions, the robot can swim forward, backward, up and down. AQUA can perform a variety of manoeuvres such as rolling on its side, looping in circles, or pivoting on a dime. Testing these acrobatics in the open ocean was one of the goals for this year's trials.
THE SEA TRIALS
In January 2005, 14 researchers headed south to Barbados, arriving at McGill's Bellairs Research Institute with six ultra-large watertight Pelican cases filled with laptops, computer screens, cables, cameras, dive gear, underwater camera housings and, of course, one small yellow robot. As a marine biologist, I also joined the field-testing excursion.
AQUA's first trials had been staged at the Institute a year previously, testing its manoeuvrability and ensuring its leakproof design. Since then, months were spent improving the robot's ability to function and testing it in the pool at the Currie Gym. Compared to a pool's controlled environment, the open sea presents many obstacles: strong currents, poor visibility, waves, the effects of sand and salt on electronics, and beach tourists stepping on cables. The objective of this year's week-long sea trial was to see if the improved AQUA could function with amphibious legs and swim autonomously in more complex conditions.

AQUA the robot cavorts on the beach at the Bellairs Institute in Barbados.
DAY 1: We were no doubt an odd sight for tourists sunbathing nearby on the Barbadian beach. Deep-dish batteries, computers, cables and other pieces of technology littered the seashore instead of beach towels, sunhats and trashy paperbacks. After late nights of last-minute robot preparation, the trials were ready to run. But then the rains came - uncommon at this time of year - and 14 untanned and sleep-deprived robotics researchers huddled in a ramshackle boathouse looking gloomily out to a silty sea. Adverse weather and sea conditions were uncontrollable. Other obstacles cropped up, too, such as an inadequate power supply to the boathouse for operating equipment, and minor glitches in AQUA's computer code.
DAY 2: Although the weather had not improved much, this day the tourists got a show. AQUA was outfitted with a brand new pair of amphibious legs resembling half-moons with tractor tire treads. The legs alternately flopped along, allowing the robot to kick up sand on the beach, splash through the surf, and swim in the water. As tourists gathered, one remarked in a thick British accent, "Looks rather lovable, doesn't it."
DAY 3: Strong surf and silty inshore waters convinced the crew to take AQUA offshore in a boat, exposing the robot to strong currents and deep water: obstacles it had never encountered. Seven divers with cameras and the robot descended, while the rest of the team with computers rocked and rolled on the surface in the rain. Below the waves, the robot was able to manoeuvre successfully in the currents while swimming to a new maximum depth of 12.8 metres, or 42 feet.
DAY 4: Back at Bellairs beach, it took five students - otherwise known as "cable wranglers" - to protect AQUA's sensitive tether from the potentially destructive footsteps of tourists. Underwater, despite the silt, the robot was able to follow a moving yellow ball without the assistance of the onshore operator for the first time. The team had proved that AQUA could function autonomously. It was a successful week of sea trials. "We accomplished more than we had hoped despite the horrendous conditions," said Dudek. "It was incredibly motivational for the students on the project. In terms of intellectual payoff, the entire experience was really very worthwhile."
THE FUTURE OF THE ROBOT
So where do these tests, trials and sea frolics lead? Combining locomotion of robots with underwater vision leads to larger research questions. Having achieved locomotion, can you teach the robot to navigate through the water autonomously? For example, can the robot follow a moving target, such as a diver? Or can it recognize underwater features, such as coral outcrops, and verify its location? "Very few robots use vision underwater," Dudek says. "In fact, there's very little comparable computer vision research. We're not the only people working on underwater vision, but we are some of the very few."
At York, the AQUA team is constructing an additional vision system with a three-camera enclosure capable of acquiring high-quality video imagery. Using multiple cameras, they can build an accurate reconstruction of a three-dimensional underwater scene to improve the robot's sensory ability.
The next step is to build another AQUA, version 1.5, based on a more efficient design incorporating their new vision technologies. As the engineer implementing these changes, Chris Prahacs is looking forward to this new phase for AQUA: "I am very excited about the upcoming redesign and trying to push the robot further." This next step - funded in part by Precarn Incorporated, a non-profit consortium of corporations, research institutes and government partners - also includes examining commercial opportunities for AQUA. With their new grant, says Prahacs, "we'll have more time and freedom to make improvements to the existing robot platform."
The redesign will include several changes to the physical robot as well as computer software. Prahacs would like to see more electronic integration and power efficiency. He also plans to condense the two computer processors in the current design into one, thereby reducing both space and costs.
Another plan is to reduce the robot's reliance on the fibre optic tether, its only link to the above-water world. But since the technology is in its infancy, the reduction will be done in steps. First, a much shorter tether floating to the sea surface will be connected to the shore-based computers with a wireless link. Eventually, the goal is to eliminate the tether altogether, allowing the robot to navigate and perform specific functions on its own.
An autonomous underwater robot opens up a large range of practical applications, greater than just scaring tourists out on the reef. "We originally thought of applications like the inspection of underwater telecommunications pipelines or the hulls of ships," Dudek explained. "Now there are potential applications in aquaculture. Clearly, there are also a lot of applications in coastline surveillance for security and other military uses."

AQUA designer Chris Prahacs, BEng'02.
One potential application is monitoring the health of marine ecosystems, such as coral reefs. Using scuba divers and standard counting methods for fish or corals can be very time consuming. As well, a human diver can only spend a limited amount of time underwater. From the 2005 sea trials, we know that AQUA is capable of rapidly collecting images of marine life while swimming along a 50-metre measuring tape laid on the sea floor. Later, above water, these images can be reviewed for counting and identifying marine organisms. Unlike a diver, AQUA could stay submerged all day, given suitable battery power, and not even break for coffee.
Dudek notes that "coral reefs are an important ecosystem and in tremendous need of help." Coral reef ecologists estimate that in recent years, 20% of all reefs have been destroyed by human-induced factors such as increasing sea temperatures and sedimentation. Last year's Status of the Coral Reefs of the World reported that "globally, governments and managing agencies acknowledge the need to monitor coral reef health to prevent further losses."
Regardless of AQUA's eventual use, the team continues to make advances in the field of underwater robotics. Dudek suggests that this field has a synergy between building physical artifacts that do interesting things, understanding hardcore science such as physics, and incorporating ecological ideas.
"You can move back and forth between these kinds of sub-domains," he says. "One day I can be hooking up circuit boards and cables and conducting experiments in the pool. Another day I can be worrying about a differential equation and the relationship between shading and lighting. The third day, I can be thinking about what turtles do, how they swim, and why they have such big eyes. It's wonderful."
Michelle Théberge is a marine biologist now living on Vancouver Island.

Members of the research crew at work on AQUA in Barbados.
